Comment fabriquer une voiture robot ?
La robotique devient de plus en plus tendance. Néanmoins, avant de se lancer dans de grands projets, pourquoi ne pas commencer par une voiture robot assez simple ?
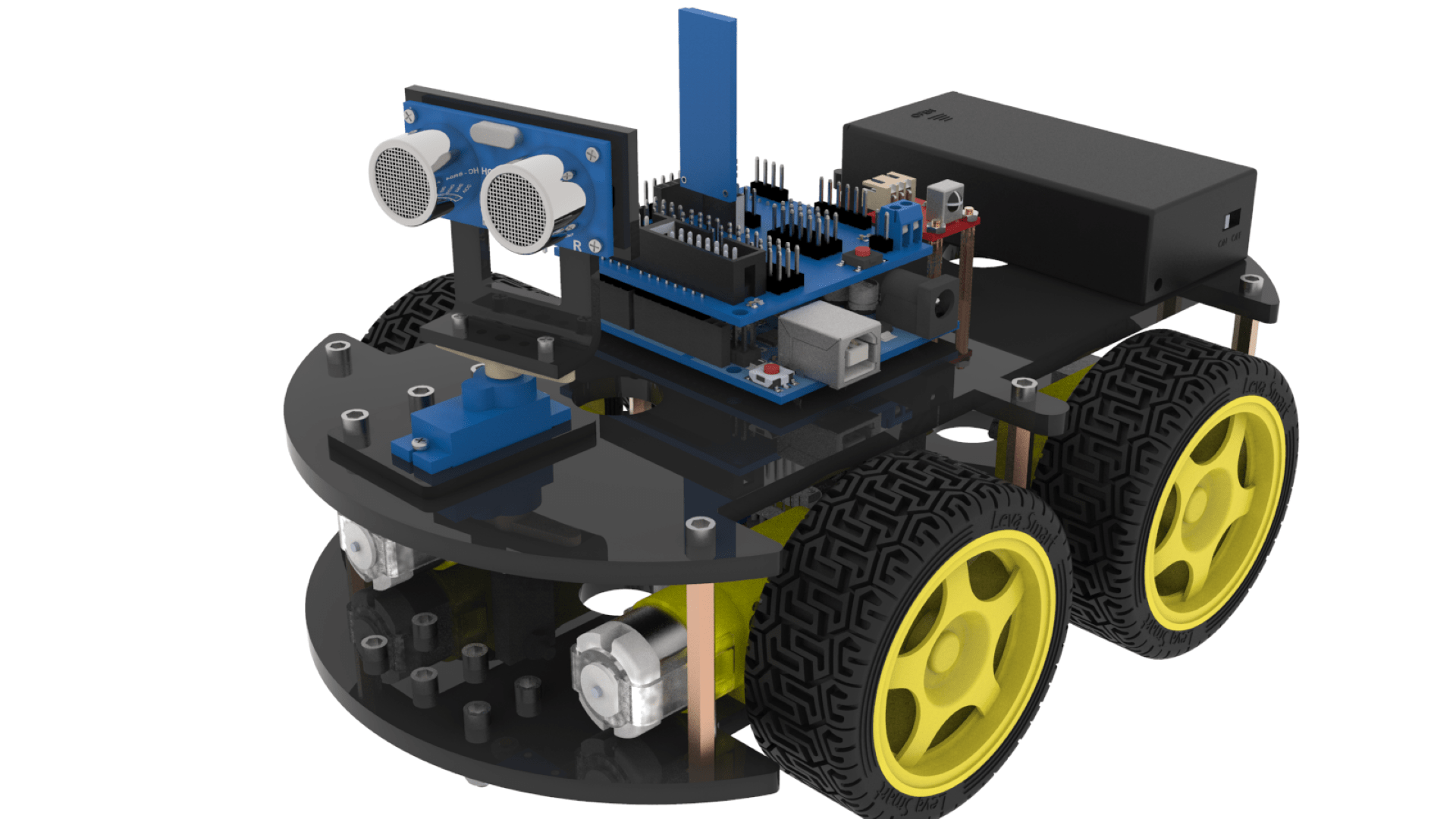
Pour tous ceux qui s’intéressent à la robotique, la fabrication d’une voiture robot (voiture programmable)est intéressante. En fait, ce robot mobile est un véhicule qui peut se déplacer de manière autonome. Fabriquer un tel engin vous permet à la fois de vous amuser et de vous initier à la robotique. D’ailleurs, ce type d’appareils peut avoir différents usages selon la configuration. Cependant, il vaut mieux ne pas avoir les yeux plus gros que le ventre. Un débutant devrait commencer par un engin relativement simple à construire et à programmer.
Les matériels nécessaires pour fabriquer une voiture robot
La construction de ce type de robots ne requiert aucune compétence ni connaissance particulière. Néanmoins, avoir des connaissances en électronique et en programmation pourrait rendre le processus plus facile. Par ailleurs, il faut avoir à disposition le matériel nécessaire, comme un microcontrôleur. Pour ce qui est de la programmation de la machine, il vous suffit de copier consciencieusement des lignes de code. De fait, vous devez également avoir un ordinateur à votre disposition.
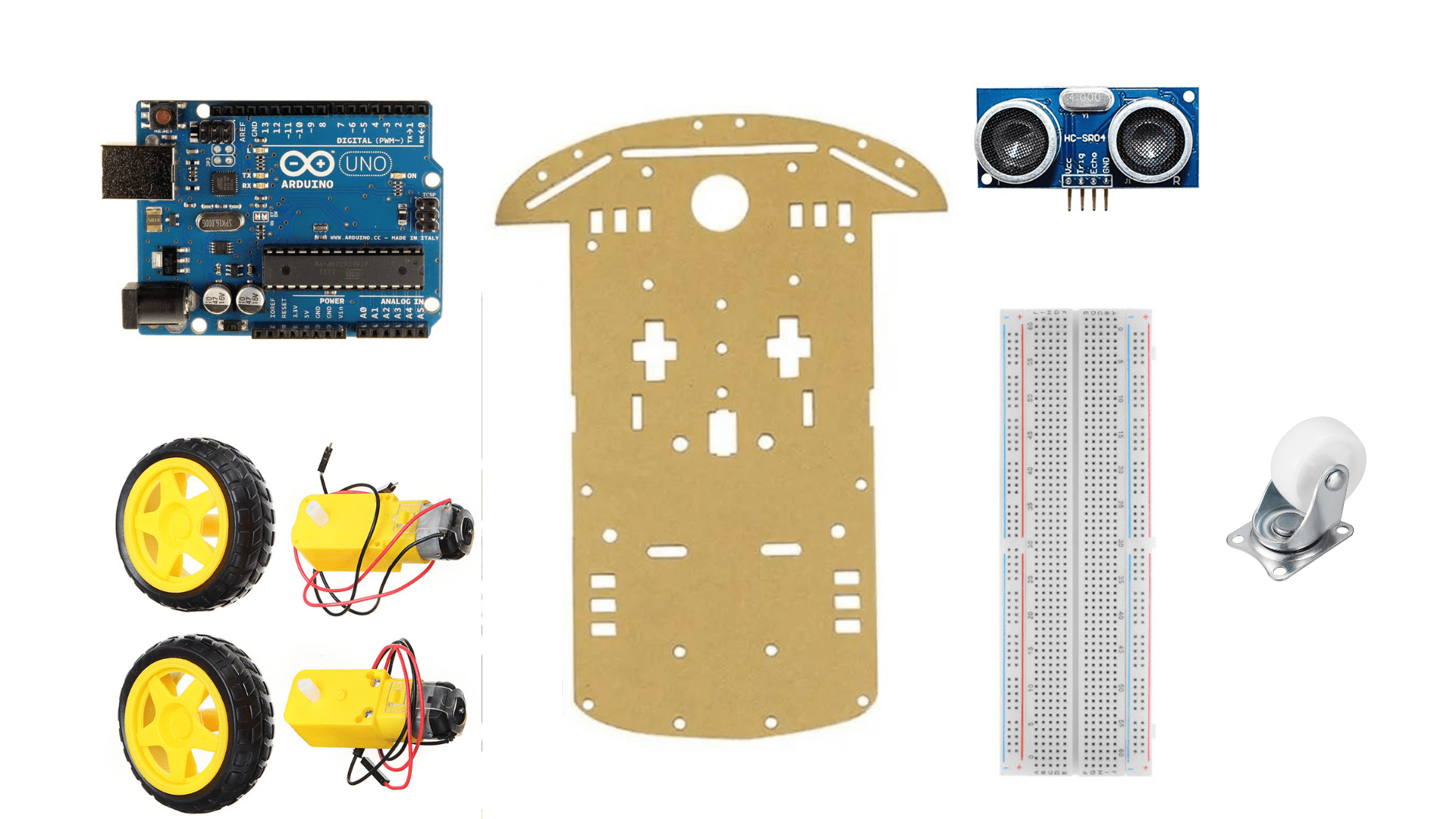
Par ailleurs, vous trouvez ci-après la liste de ce qui compose la voiture programmable. Bien sûr, en cas de doute sur les dimensions d’un ou plusieurs objets, lisez les instructions pour avoir un ordre d’idées. Voici donc la liste :
- une carte Arduino Uno (microcontrôleur) ;
- un capteur à ultrason ou capteur de distance (avec quatre broches) ;
- un circuit intégré L293D ;
- des câbles pour Arduino ;
- un châssis Arduino ou n’importe quelle plaque qui peut servir de châssis ;
- deux moteurs électriques, précâblés de préférence (motoréducteurs à courant continu 3 V ~ 6 V DC, par exemple) ;
- deux roues ;
- une roue pivot ;
- un ruban adhésif à double-face ;
- un ruban adhésif à simple face ;
- une pile de 9 V et de son connecteur ;
- un boîtier de piles AA 9 V et d’un câble pour Arduino ;
- des piles AA ;
- un breadboard ou plaque d’essai sans soudure avec 830 points (d’autres modèles fonctionnent également).
N. B : La carte Arduino Uno est le microcontrôleur Arduino le plus simple d’utilisation. Néanmoins, vous pouvez utiliser d’autres cartes Arduino. Dans ce cas-là, vous devrez faire vous-même les recherches concernant les branchements.
La pose des composants de la voiture programmable
Les composants mécaniques
La première étape consiste à monter les roues, les moteurs et le châssis ensemble. Mais avant cela, emboitez chaque roue à un moteur électrique.
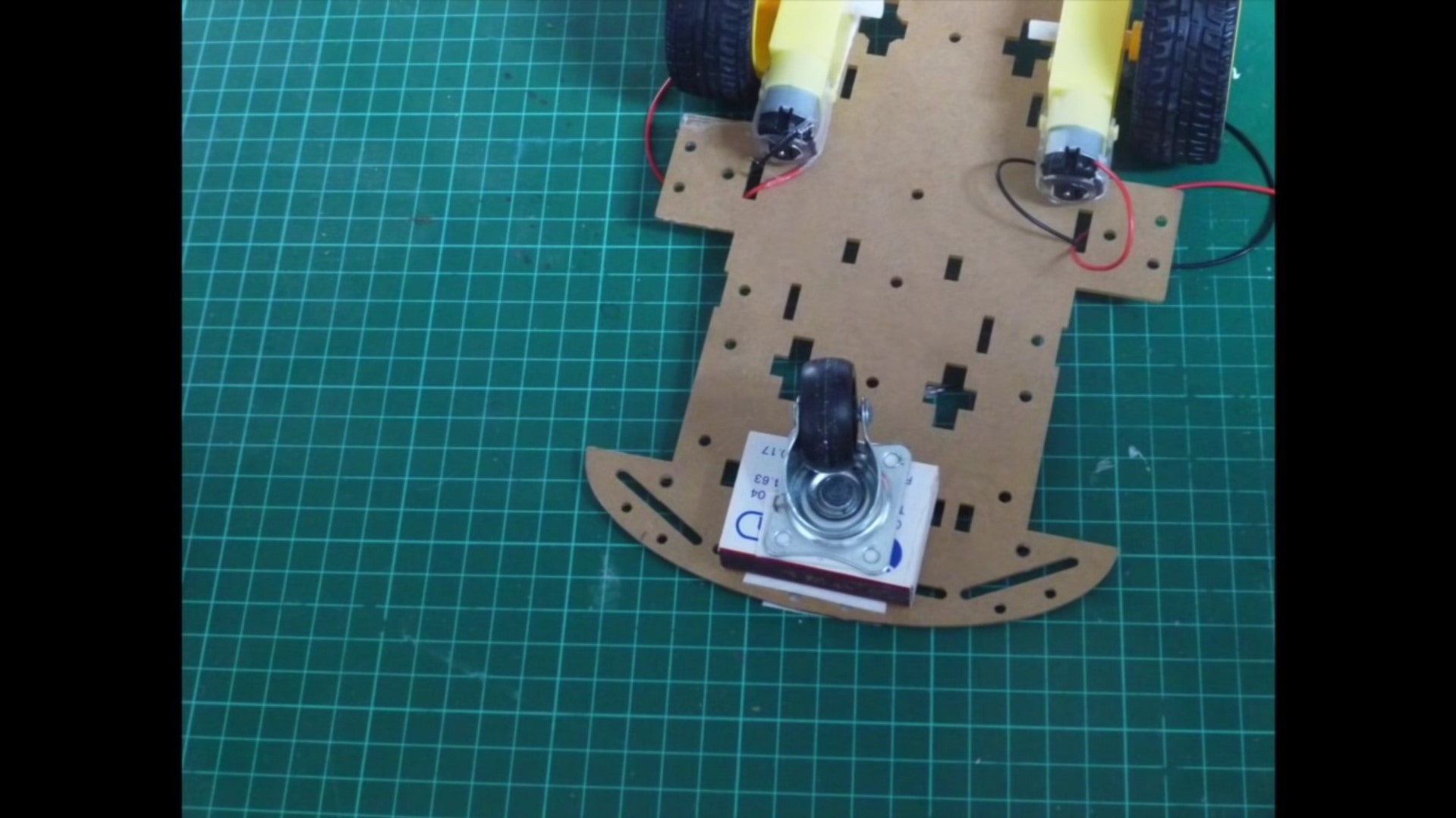
Après, repérez bien l’avant et l’arrière du support qui vous servira de châssis. Puis, il suffit de fixer les moteurs sous le châssis. Pour ce faire, marquez d’abord deux repères à l’arrière de la plaque. Les repères doivent être symétriques et se trouver sur les deux côtés opposés du châssis. Ensuite, collez les moteurs électriques sur ces points à l’aide du ruban adhésif à double-face. Plus ils sont symétriques par rapport au centre de la plaque, mieux ce sera.
Faites tout de même attention à ce que les roues aient assez de place sur les côtés pour tourner.
Concernant la roue pivot, collez-la avec un ruban adhésif à double-face à l’avant de la voiture robot. Selon le modèle de roue à votre disposition, il se peut que vous deviez surélever l’avant du véhicule. Dans ce cas, vous pouvez utiliser une boîte d’allumettes ou un morceau de bois.
Les composants électroniques
Pour l’emplacement du reste des composants, vous pouvez en décider vous-même en prenant en compte l’espace et les types de composants à votre disposition. D’ailleurs, il sera plus facile de les brancher ensemble avant de les positionner.
Les branchements électriques du véhicule
Afin de réaliser les branchements, munissez-vous des câbles adaptés à la carte Arduino.
Circuit intégré vers breadboard
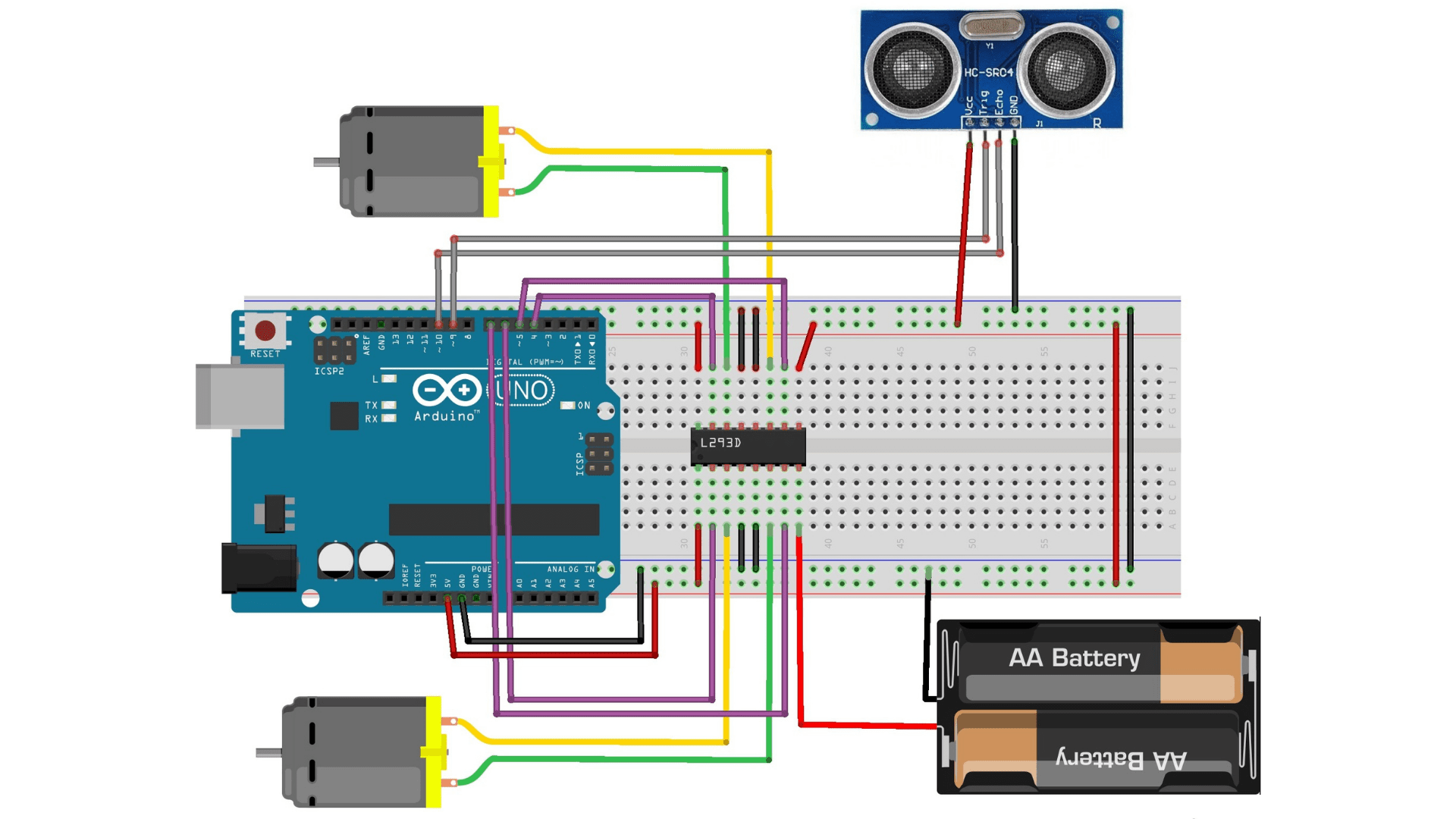
Le circuit intégré L293D possède une orientation. La partie avec le petit creux en forme demi-cercle permettra de vous repérer. Sur ce modèle de plaque d’essais sans soudure avec une longueur de 63 points, placez le L293D comme suit :
- les deux premières bornes ⇒ (31 ; E) et (31 ; F) ;
- les deux dernières bornes ⇒ (38 ; E) et 38 ; F).
N. B : Si vous avez un autre modèle de breadboard, vous devrez ajuster les branchements en conséquence. À cet effet, référez-vous à l’image ci-dessus.
Moteurs électriques vers breadboard
Pour le premier moteur électrique :
- un fil ⇒ (33 ; A) ;
- l’autre ⇒ (36 ; A).
Pour le second moteur électrique :
- un fil ⇒ (33 ; J) ;
- l’autre ⇒ (36 ; J).
N. B :
- les bornes négatives des deux moteurs ne doivent pas se faire face, de même pour leurs bornes positives ;
- vous pouvez ajuster le branchement au cours des essais si le petit robot ne fonctionne pas correctement.
Pile AA de 9 V vers breadboard
- borne négative ⇒ ligne négative (bleue) ;
- borne positive ⇒ (38 ; A).
Toutefois, ne placez pas encore la pile.
Arduino vers breadboard
Sur le côté « POWER » de la carte Arduino :
- borne « 5 V » ⇒ sur la ligne positive (rouge) ;
- borne « GND ⇒ sur la ligne négative (bleue).
Sur le côté “DIGITAL (PWM=~) de la carte Arduino :
- “7” ⇒ (37 ; A) ;
- “~6” ⇒ (32 ; A) ;
- “~5” ⇒ (37 ; J) ;
- “4” ⇒ (32 ; J).
Boîtier de piles 9 V vers Arduino
Le boîtier de piles AA servira à alimenter le microcontrôleur. Il faut le brancher à la carte Arduino avec un câble d’alimentation DC Barrel Jack.
Néanmoins, ne placez pas encore de piles AA dans le boîtier.
Capteur de distance vers breadboard
- la borne “Vcc” ⇒ ligne positive ;
- la borne “GND” ⇒ ligne négative.
Arduino vers capteur à ultrason
- “~10” ⇒ « Échos” ;
- “~9” ⇒ « Trig”.
Par ailleurs, pour brancher le capteur de distance avec les autres composants, vous pouvez utiliser votre ingéniosité. Vous pouvez, par exemple, utiliser le ruban adhésif à simple face. Le but est qu’il n’y ait aucun contact entre les différentes broches du capteur.
Fermeture du circuit électrique
Si vous faites attention, vous verrez sur l’image que les lignes positives et les lignes négatives de la plaque d’essais font une boucle. Pour fermer les boucles, vous n’avez qu’à suivre les indications sur l’image de l’ensemble du circuit :
- brancher ensemble les deux lignes bleues du breadboard ensemble avec un fil ;
- répéter le processus pour les deux lignes rouges ;
- la ligne négative à droite ⇉ (34 ; J) et (35 ; J)
- la ligne négative à gauche ⇉ (34 ; A) et (35 ; A)
- la ligne positive à droite ⇉ (31 ; J) et (38 ; J)
- la ligne négative à gauche ⇉ (31 ; A) et (38 ; A)
N. B : Pour vous repérer correctement, orientez le creux du circuit intégré vers le haut.
Vérification du branchement
Cette étape est relativement simple, mais très importante pour que le petit robot fonctionne correctement. Examinez attentivement les fils au cas où ils se mélangent.
La programmation de la voiture
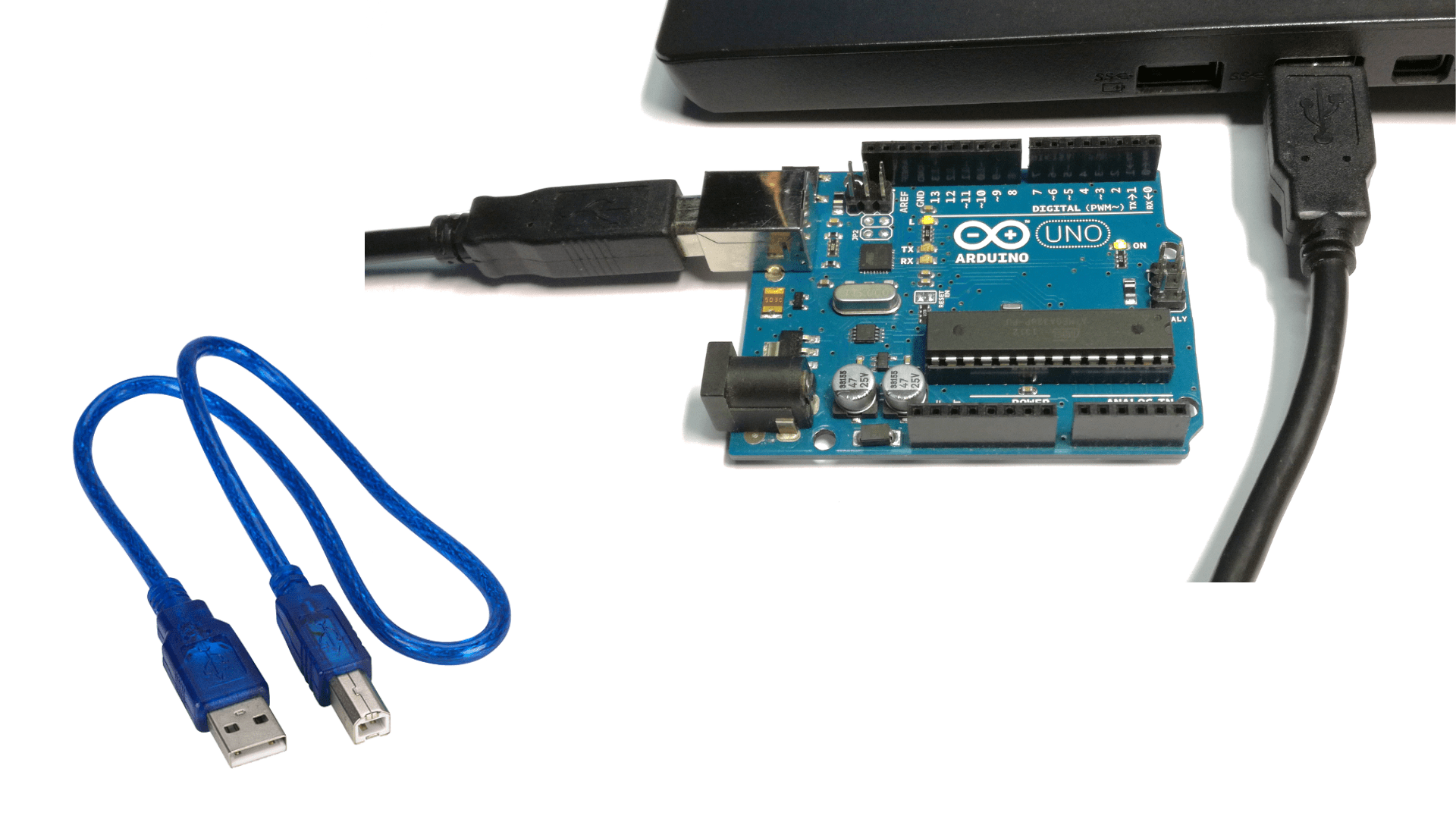
Pour les passionnés d’informatique, cette étape est la plus intéressante. Avant de commencer, vous devez connecter l’Arduino à votre ordinateur avec un câble USB adapté. Après, lancez le logiciel Arduino qui permet de rédiger le code qui définit le comportement du petit robot. Si vous ne possédez pas encore le logiciel, vous pouvez le télécharger gratuitement en ligne.
Intégration du code dans le robot
La première chose à faire est de taper le code dans le logiciel. Une fois que c’est fait, vous pouvez l’envoyer vers la carte Arduino. Le code est structuré de manière à ce que la voiture avance quelque temps. Puis, il regardera autour de lui, pour regarder s’il y a un obstacle. Si tel est vraiment le cas, il tournera à environ 45° vers la gauche et avancera à nouveau quelque tempête, ainsi de suite.
Voici le code :
#define A 500
#define B 300
#define trigPin 9 //Trig Ultrasons (sortie)
#define echoPin 10
int motor_pin1 = 4;
int motor_pin2 = 5;
int motor_pin3 = 6;
int motor_pin4 = 7;
void setup () {
pinMode(trigPin, OUTPUT); //Trig est une sortie
pinMode(echoPin, INPUT); //Echo est une entrée
pinMode(motor_pin1,OUTPUT);
pinMode(motor_pin2,OUTPUT);
pinMode(motor_pin3,OUTPUT);
pinMode(motor_pin4,OUTPUT);
delay(700);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); //Trig déclenché 10ms sur HIGH
digitalWrite(trigPin, LOW);
// calcul de la distance :
duration = pulseIn(echoPin, HIGH); // Distance proportionnelle à la durée de sortie
distance = duration*340/(2*10000); //Vitesse du son théorique
if(distance >= 20) { //Si il n'y a pas d'obstacle à plus de 20cm
digitalWrite(motor_pin1,LOW); //Alors il avance
digitalWrite(motor_pin2,HIGH);
digitalWrite(motor_pin3,HIGH);
digitalWrite(motor_pin4,LOW);
}
else { //Sinon (si il voix un objet a moin de 20 cm)
digitalWrite(motor_pin1,HIGH); //Le robot part en arriere puis 500 milliseconde
digitalWrite(motor_pin2,LOW); //aprés il part vers la gauche.
digitalWrite(motor_pin3,LOW);
digitalWrite(motor_pin4,HIGH);
delay(A);
digitalWrite(motor_pin1,LOW);
digitalWrite(motor_pin2,HIGH);
digitalWrite(motor_pin3,LOW);
digitalWrite(motor_pin4,HIGH);
delay(B);
}
}Démarrage de la voiture
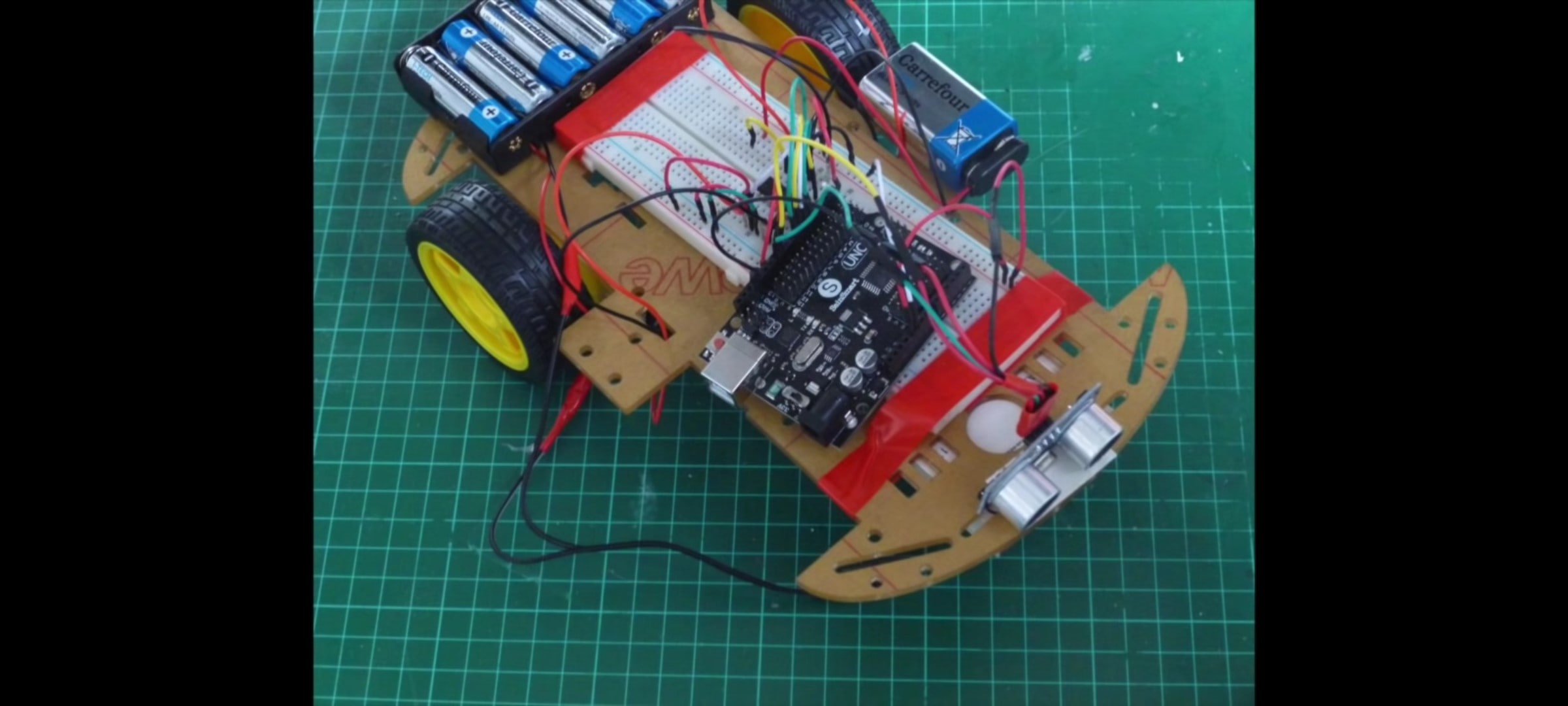
Pour tester la voiture programmable, posez d’abord l’appareil sur une surface plate. Ensuite, placez les piles AA dans le boîtier à piles ainsi que la pile de 9 V à sa place.
Personnalisation du robot
Modification du comportement du robot
Lorsque vous avez fini de profiter de votre réussite, vous pouvez maintenant effectuer des expérimentations. Pour ce faire, changez différentes valeurs du code pour modifier le comportement de la voiture programmable.
D’ailleurs, vous pouvez trouver différents autres codes sur Internet en indiquant les différents composants. Ensuite, vous n’avez qu’à copier et à coller les codes pour après les ajuster.
N.B : Tout comme précédemment, vous devez installer le code sur le microcontrôleur à chaque modification.
Remarque :
Dans la partie du code, la partie qui suit le double slash permet de mettre des commentaires. Vous pouvez donc vous en servir pour noter les effets de chaque partie du code. D’ailleurs, vous pouvez ajouter d’autres sections de commentaires selon votre désir.
.