A la rencontre de Jack Schorsch, fondateur d’IMSystems
Bonjour monsieur Schorsch, pourriez-vous vous présenter à nos lecteurs et nous présenter la société IM SYSTEM ?
Bonjour, Je suis Jack Schorsch. Je suis l’inventeur de l’Archimedes Drive et le fondateur d’IMSystems.
Je suis originaire des États-Unis, où j’ai travaillé dans le domaine de la bionique et des prothèses avancées. C’est pendant cette expérience que je suis tombé sur le problème des engrenages qui sont trop lourds, trop volumineux et trop faibles pour les nouveaux robots.
J’ai gardé cette problématique lorsque j’ai étudié pour faire mon doctorat à l’Université technique de Delft (Pays-Bas) et c’était à cette étape lorsque je travaillais sur un robot que la solution m’est venue: un engrenage qui utilise le frottement plutôt que les dents pour transmettre la puissance. C’était le début d’IMSystems. Quelques années plus tard, nous
avons formé une équipe grandissante d’ingénieurs travaillant à partir de RoboValley aux Pays-Bas, entièrement concentrés sur la fabrication de notre équipement pour fabriquer des robots plus puissants, plus légers et plus précis.
Quel type de technologie avez-vous mis à dispositions des ingénieurs en
robotique ?
S’équiper pour le changement !
Les engrenages transforment le mouvement de rotation en couple, et cela depuis des siècles. Ils sont cruciaux dans la conduite d’innombrables innovations issues de l’inventeur de la Renaissance robotique, Leonard de Vinci, au Rover lunaire.
Mais la technologie des engrenages n’a pas évolué, n’ayant connu aucune découverte capitale ces 50 dernières années, cette disette dans son développement n’est en aucun cas du a un manque de demande.
Jack Schorsch, le fondateur d’IMSystems explique : “ les robots de l’avenir, agiles et précis, imaginés par des ingénieurs, sont entravés par le choix de transmission : trop volumineux, lourds et imprécis. De plus, les meilleurs engrenages sont à des prix prohibitifs.
Ils sont construits sur mesure, rendant leur approvisionnement extrêmement peu fiable.
Nous appelons cela le problème de réducteur de vitesse.
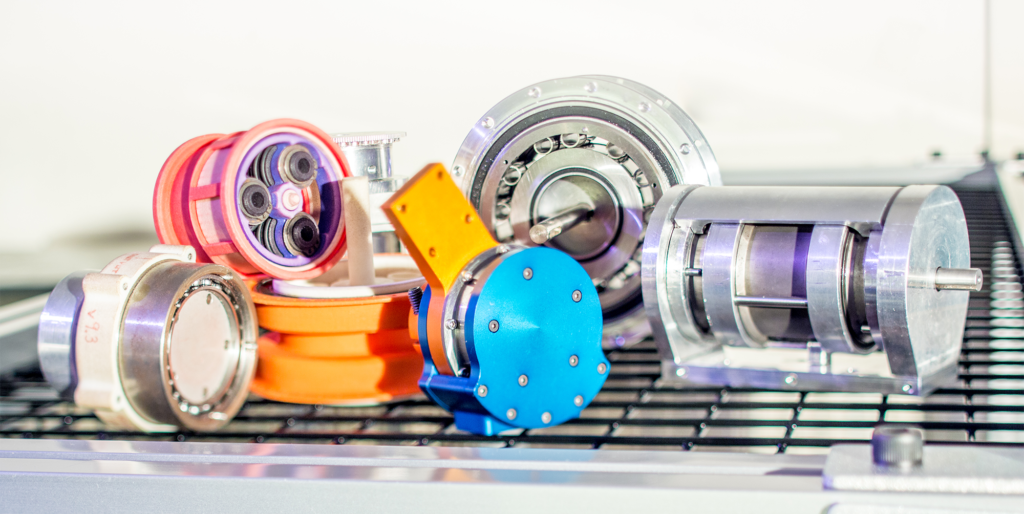
L’Archimedes Drive : Science Friction
L’Archimedes Drive représente un énorme saut en avant dans la technique des réducteurs de vitesse. Contrairement aux engrenages conventionnels, la transmission composée ne repose pas sur des rouages aux dents fragiles. A leur place, les contacts par frictions transforment la vitesse en couple. Les Flexrollers (rouleaux radialement flexibles) brevetés – cylindres en acier lisse et creux – compressent et transmettent la puissance de rotation dans
le centre à un anneau en rotation (la sortie). Le design inventif a une précision inégalée grâce aux ratios très élevés qu’il produit : jusqu’à 10.000 : 1 en une seule étape compacte. C’est une avancée 25 fois supérieure à la meilleure technologie disponible.
Votre solution hardware Archimedes Drive est-elle déjà appliquée par
certains robots ?
Nous sommes actuellement dans la dernière phase de test. Ce qui signifie que nous avons prouvé 9/10 des exigences techniques que nous expectant. La dixième exigence c’est la durabilité. La durée de vie des tests peut aller de quelques mois à plusieurs années. Avec un nouvel investissement que nous allons obtenir au premier trimestre de 2019, noussouhaitons utiliser 3,5 millions d’euros pour tester ce dernier sinistre et développer
d’avantage l’Archimedes Drive. Aujourd’hui, nous avons réalisé plusieurs projets de Co-développement. Nous avons conçu et construit des systèmes de transmission pour un vélo électrique, une éolienne en mer, des prothèses et un robot parallèle. Actuellement, des étudiants de l’Université des sciences appliquées implémentent nos transmissions dans un Scara- robot à des fins de démonstration (photo ci-jointe).
Actuellement, nous travaillons sur des projets pilotes avec deux des plus grands fabricants mondiaux des robots industriels qui vont implémenter l’Archimède Drive dans leurs futurs robots.
Quelles évolutions appliquerez-vous à votre solution dans un avenir proche ?
Les fabricants de robots cherchent désespérément des transmissions plus précises. Notre objectif est d’être au moins 10 fois plus précis que la transmission actuellement disponible.
Avec cette solution, nous sommes en mesure de faire un grand pas en précision dans le domaine de la robotique médicale / chirurgicale et industrielle.
Votre mot de la fin ?
Bien que les logiciels fussent énormément développés au cours des 25 dernières années, le dernier développement dans les technologies de transmission a eu lieu en 1957 avec le ’’Strain Wave Gear’’. Cela signifie que les logiciels modernes ultra-avancés doivent collaborer avec du matériel ancien. Une véritable révolution robotique aura lieu que si ces deux
derniers (logiciels et technologies de transmission) travaillent harmonieusement ensemble.